
Video
True non-contact calibration that gets a system back up and running in minutes and minimizes downtime.
A major advantage of this method is that in applications with a camera mounted on the robot arm, this flexibility can be used to move the workspace in the robot workspace. This results in a high degree of flexibility. In contrast to classical calibration methods, the field of view of the sensor during calibration and the working area of the robot do not have to be identical in handeye calibration. This means that the user can calibrate the sensor in one location and then use it in another location of the robot‘s working area. This is particularly useful if the spatial conditions do not allow the placement of a calibration plate. Hand-eye calibration is thus a flexible and reliable method to improve the accuracy of sensors on the robot arm.

VISOR庐 Robotic Application Example: Automated screw insertion
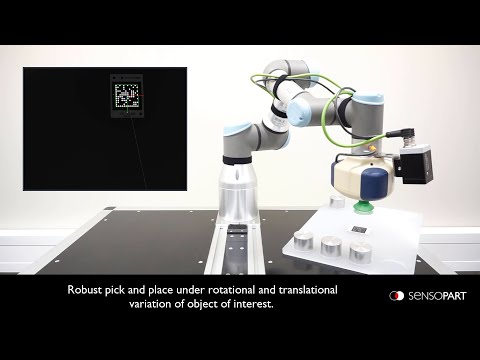
VISOR庐 Robotic Application Example: Pick & Place from Load Carrier
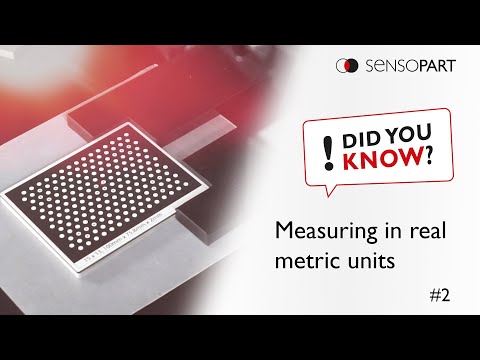
Did You Know? - #02 Measuring in real metric units with a calibration plate

Hand-Eye-Calibration

Automation of a screwing application at Kia Slovakia
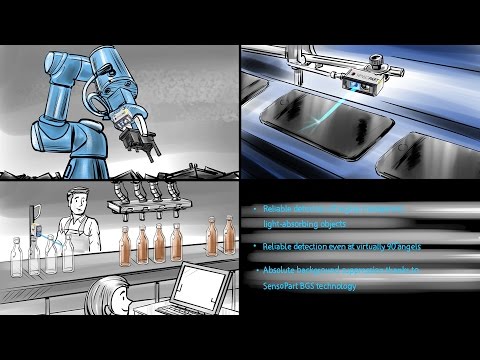
Photoelectric sensors with BlueLight technology open up new fields of application